
Projects
Here is a general overview of the projects I am currently leading or participating in, or have been involved in the past.
 |
|
|---|---|
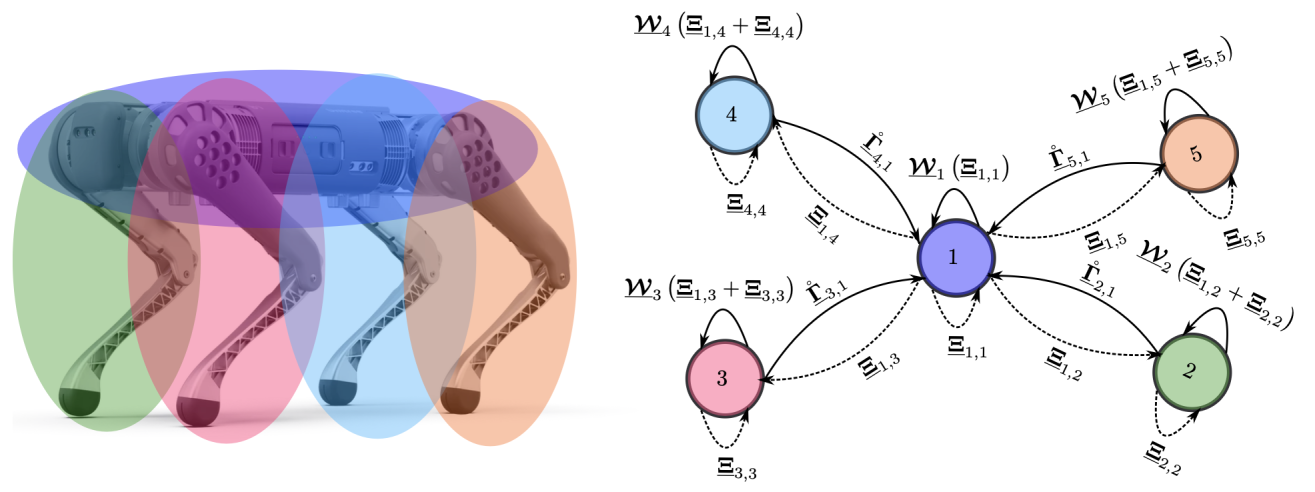
| Robotic laser cutting using adaptive control. | Complex robots can be divided into subsystems to simplify modeling and control: meet the Dynamic Modular Composition (DMC) formalism. |